Waterloop
SpaceX Hyperloop
Linear Induction Motor Team Lead

Waterloop is Waterloo's SpaceX Hyperloop team that competes in the annual Hyperloop competitition that takes place in California each summer. Teams from around the world are competing to build a highspeed self-sustaining pod to attempt to create a new method of transportation for the future. The pods achieve speeds of up 466km/h or 290mph to travelling in a vacummed tube along an I beam. The competition is funded by a collboration between SpaceX and Tesla. The goal behind the innovation is to one day, build underground airtight tunnels that could speed up the flow of traffic within and across cities exponentially.
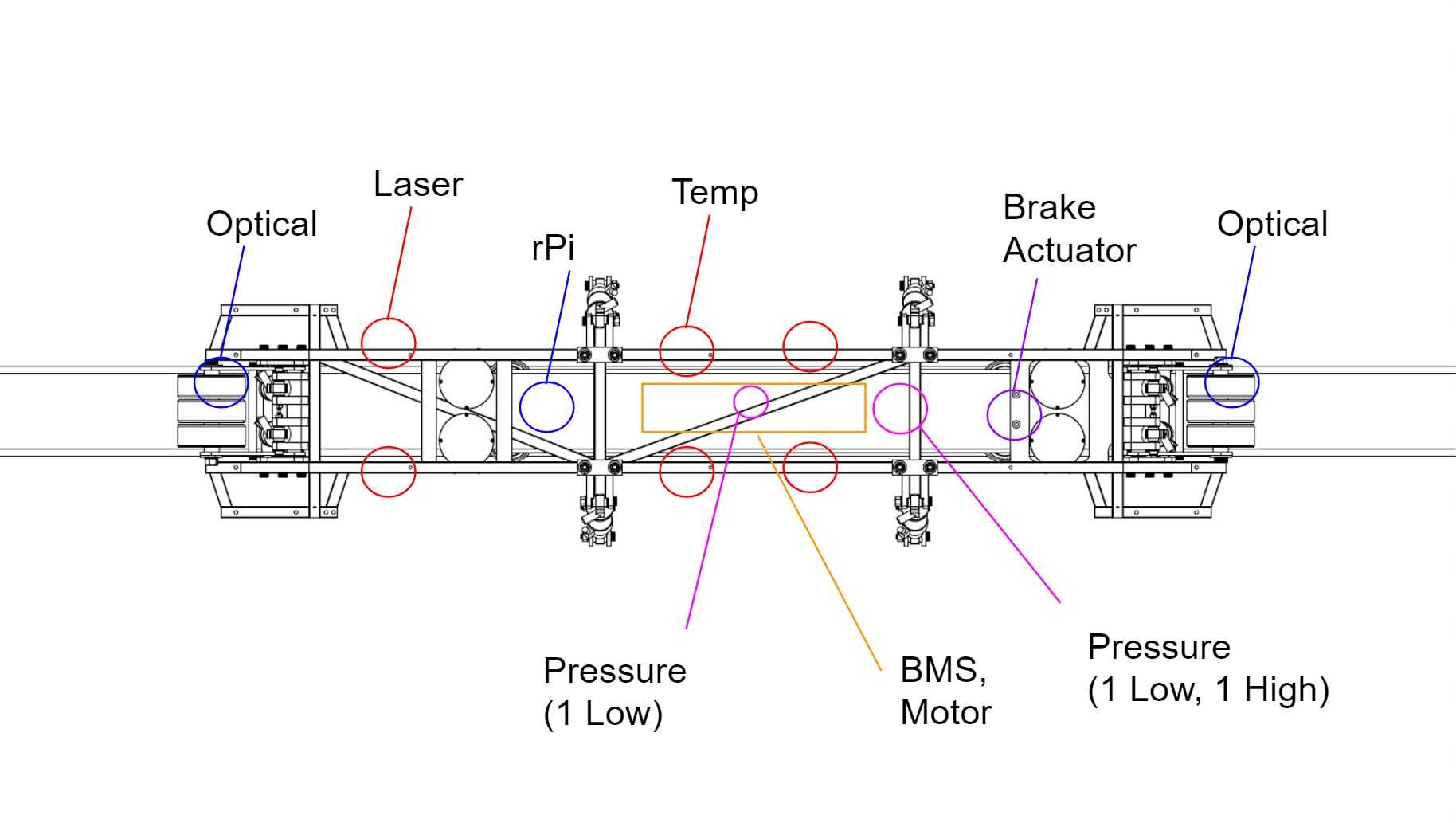
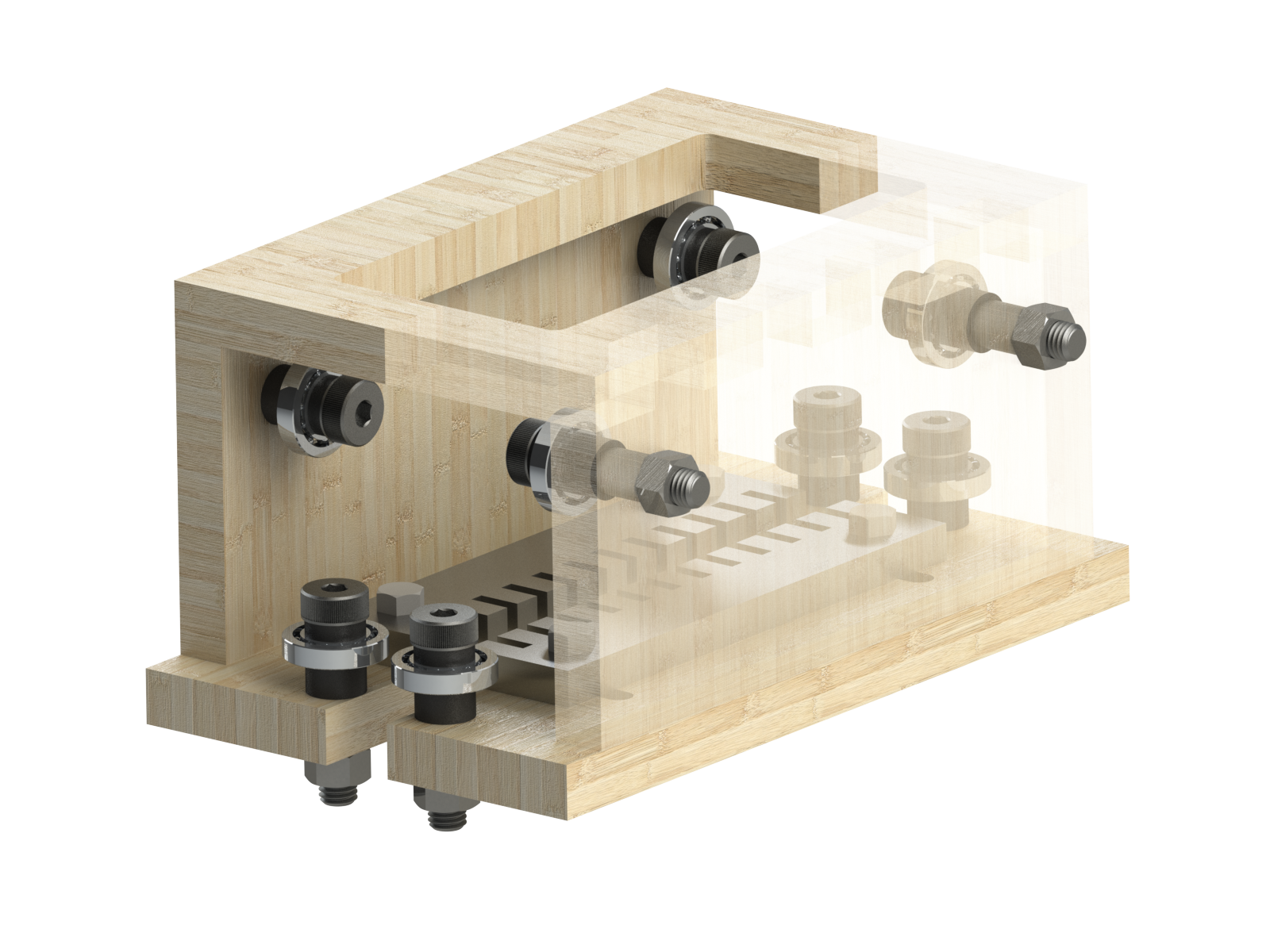
On Waterloop, I lead the Linear Induction Motor Team (LIM). Our team consists of over 25 active members this term and we have successfully created multiple versions of functioning LIMs on a dual protoype chassis rig. As LIM team lead, I organize and manage tasks for my team members to maximize efficiency by assigning them to tasks that they are passionate and interested in. I work on integrating subsystems in the form of software, electrical, and mechanical. I've configured and programmed embedded sensors such as magnometer, force transducer, digital temperature sensor, hall effect sensor, and accelerometer to collect data and experiment with the LIM and its limits. This data can then be compared against an ANSYS simulation using Maxwell's Equations to create a model that can simulate larger, scaled up versions of the LIM. I've designed multiple prototype variations using SolidWorks and AutoCAD for the LIM and the chassis it runs on, and I've machined the sucessful designs using wood, plastic, and aluminum extrusions. I've also built and created complex circuits in order to efficiently and safetly power the LIM during usage.
If you would like to see more of what our team does and what I've worked on, please checkout the two links below for our website and some photos and documentation of my work! =)